

То потухнет, то погаснет.

Запись опубликовал parovoZZ ·
1 027 просмотров
Приехала ко мне прямо от ковбоев плата под звучным названием LAUNCHPAD. Что на ней имеется? Прежде всего, это целевой МК на основе FRAM памяти - MSP430FR2433. Также на плате присутствует программатор/отладчик. И самое вкусное - это аппаратная обвязка технологии EnergyTrace™ Technology.
В какой среде писать программу? TI предлагает две "каропки" - это полностью бесплатная CCS на основе ECLIPSE, и второй вариант - IAR. Также присутствует онлайн-редактор с минимальными возможностями (необходим агент на компьютере и расширение в браузере). CCS - это крайне тормознутый монстр (по сравнению с MSVS), при этом в нем есть всё для комфортной работы, хотя несколько и непривычно после MSVS (необходимо нажимать Ctrl + Space, чтобы появились подсказки).
Первая мысль после запуска IAR - да поотрубать всем головы, кто ЭТО придумал. Редактор кода убогий настолько, насколько это возможно в принципе. Это самый обыкновенный блокнот с минимальной подсветкой. Правда, можно прикрутить внешний редактор типа notepad++, но тогда все "фенечки" (которых и так нет) исчезнут (нельзя перейти к декларации переменной/функции, нет подсказок и прочее). Тем не менее, IAR очень быстро запускается и очень шустро работает. Лично я пока его и использую, несмотря на всю убогость редактора. Лицензионная политика у IAR такая - либо бесплатно всегда, но не более 8кБ, либо без ограничений, но 30 дней. MISRA в обоих случаях не доступна.
Мало кто знает, но у MSP430 тоже есть свой фреймворк, который полностью повторяет "arduino". Называется он Energia. Но, т.к. я изучаю МК, а не фреймворки, пользоваться я ей не буду.
Литература у TI для своих МК организована так (это не правило, но в большинстве случаев так) - есть даташит на целое семейство МК (в нашем случае это MSP430FR4xx and MSP430FR2xx family User's Guide) с общим описанием всевозможных модулей, а для отдельных МК из этого семейства прилагается ещё один даташит уже с подробным описанием (что есть и чего нет в МК описывается именно в этом даташите). Для MSP430FR2433 документ так и называется: MSP430FR2433 Mixed-Signal Microcontroller datasheet.
Давайте уже поморгаем. Моргать в стиле "Hello, world" уже не интересно, поэтому будем моргать в стиле "Привет, ЗЕМЛЯНЕ!". Тем более, что у нас для этого есть аж пять таймеров со счетчиками в 16 бит.
Первое, что делаем, выключаем вачдог (по-умолчанию он включен):
WDTCTL = WDTPW | WDTHOLD;
Затем необходимо определить как выход тот пин, который мы можем подключить к блоку сравнения таймера и на котором у нас сидит светодиод. Это первая нога первого порта:
P1DIR |= BIT1;
Бит BIT1 в заголовочнике определен как:
#define BIT1 (0x0002)
Затем нам необходимо подключить выход блока сравнения к пину, чтобы на нем генерировать ШИМ. MSP430FR2433 здесь особого простора не предоставляет - всё жестко привязано аппаратно внутри. Поэтому открываем даташит на МК и смотрим картинку:
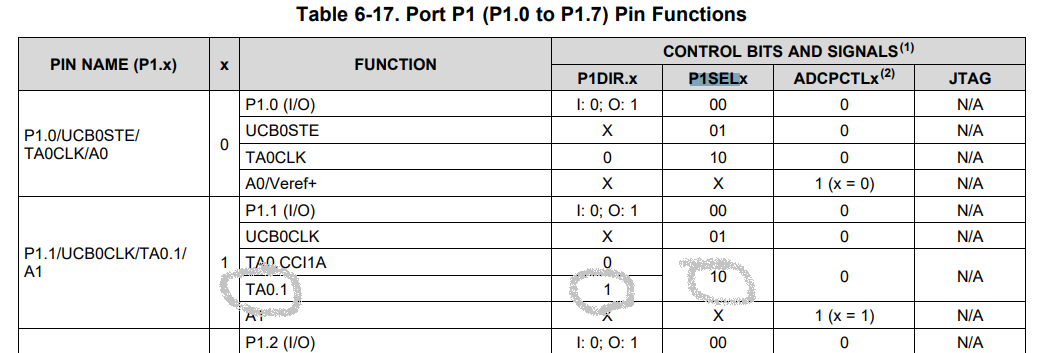
К пину 1 порта 1 (P1.1) можно подключить первый компаратор нулевого таймера А (TA0). Первое услови е мы уже выполнили - пин переключили на выход. Теперь необходимо определить альтернативную функцию для выбранного пина. Это делается с помощью пары регистров P1SEL0 и P1SEL1. В них, согласно таблицы, необходимо записать число 10 на то место в регистре, пин которого должен обладать альтернативной функцией (да, мозгодробительно))):
P1SEL1 = BIT1;
Если бы мы подключали выход второго компаратора таймера А к пину (а это второй пин первого порта), то писали бы так:
P1SEL1 = BIT2;
Теперь запускаем таймер. ШИМ-ить будем, как уже сказали, нулевым таймером Timer_A (это экземпляр типового таймера A3). Чтобы таймер заработал, ему необходимо подключить источник тактирования. Источников тактирования в MSP430 несколько: внутренние ACLK и MSCLK, а также внешние - TACLK и INCLK. Для разнообразия, мы будем использовать сразу два: ACLK и MSCLK. Первый генерирует частоту 32768 Гц, второй 1 МГц (по-умолчанию. Но возможно и перестроить). Для нулевого таймера Timer_A бы будем использовать частоту 1 МГц, поэтому подключим MSCLK. Счетчик в этом типе таймера может считать до определенного значения как вверх, так и вверх и вниз, а также только вверх до максимального совего значения (0xFFFFFFFF). Мы определим, что счетчик считает только вверх и сбрасывается при достижении значения 256. Также перед включением таймера необходимо сбросить его самого и его предделитель. За это отвечает бит TACLR. Теперь всё сказанное запишем в коде:
TA0CCR0 = 256; TA0CTL = TASSEL__SMCLK | MC__UP | TACLR;
Перед запуском таймера необходимо настроить компаратор. У компаратора есть несколько режимов работы. Их можно посмотреть в даташите на семейство:
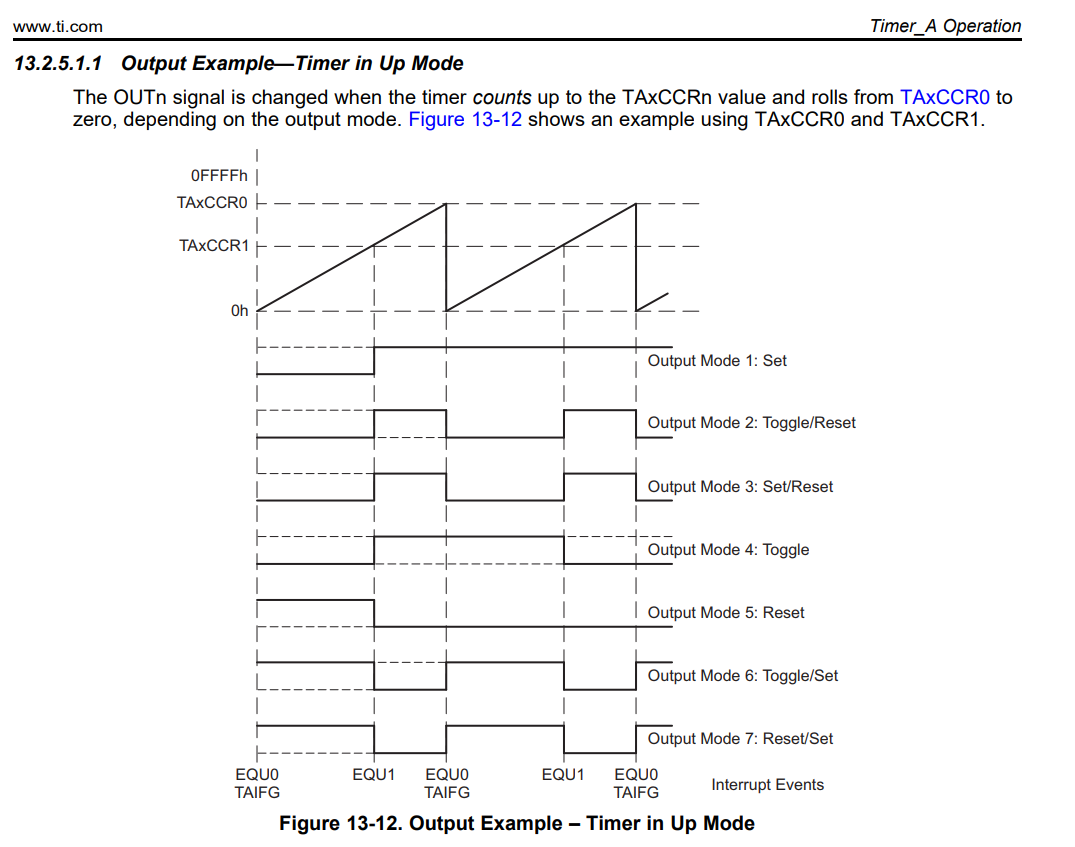
Среди них я выбрал режим Toggle/Reset. Это режим Mode2:
TA0CCTL1 = OUTMOD_2;
И определим значение регистра сравнения сразу после инициализации:
TA0CCR1 = 255;
Всё, таймер настроен и уже работает. Для модуляции ШИМ -а будем использовать другой таймер этого же типа - TA1.
Чтобы промодулировать наш ШИМ генератор (создание эффекта плавного затухания и загорания светодиода), я буду использовать такую конструкцию, вызываемую в прерывании от первого таймера Timer_A:
#if defined(__TI_COMPILER_VERSION__) || defined(__IAR_SYSTEMS_ICC__) #pragma vector=TIMER1_A1_VECTOR __interrupt void TIMER1_A1_ISR(void) { switch(__even_in_range(TA1IV, TA1IV_TAIFG)) { case TA1IV_TAIFG: if (dir) { TA0CCR1 = count; } else { TA0CCR1 = 256 - count; } if (!count) { dir = !dir; } count --; break; default: break; } }
где:
volatile uint8_t count; volatile uint8_t dir;
Ну и запуск таймера TA1. Отличие здесь в разрешении прерывания, источнике тактирования и отсутствие работы компараторов:
TA1CCR0 = 255; TA1CTL = TASSEL__ACLK | MC__UP | TACLR | TAIE;
Чтобы зря не гонять процессор между прерываниями, я его буду останавливать. Исторически так сложилось, что MSP430 предлагает богатый набор режимов энергосбережения. Я буду использовать режим остановки процессора - LPM3:
__bis_SR_register(LPM3_bits | GIE); __no_operation(); // Для внутрисхемной отладки
Выход из режима энергосбережения или его смена в МК MSP430 устроено несколько иначе, чем в Atmel. Суть в том, что периферийное устройство будит процессор, запускает необходимый осциллятор для своей работы, после завершения своей работы останавливается осциллятор (если он больше никому не нужен), а процессор уходит в тот режим, из которого его разбудили. И здесь каких-то телодвижений со стороны программиста совершать не требуется. Другое дело, если мы хотим совершить какие-то действия вне прерывания после пробуждения. Тогда в обработчике прерывания нам необходимо вручную сменить режим работы.
Ну и вишенка: EnergyTrace™ Technology.
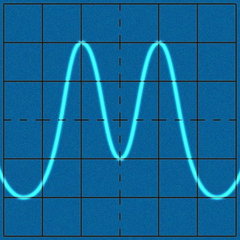
На плате установлен ШИМ стабилизатор на основе МК из семейства MSP430. Как оно устроено и как работает - всё есть в документах от TI. Суть в том, что такая технология позволяет измерять токи вплоть до сотни наноампер с приемлемой точностью. Из минусов - работает только в режиме дебага. Впрочем, запускаем наш код и смотрим на токопотребление:

Мы видим, что с ростом скважности ток падает и наоборот. Ну оно и логично.
Enjoy!







0 Комментариев
Рекомендуемые комментарии
Комментариев нет
Присоединяйтесь к обсуждению
Вы публикуете как гость. Если у вас есть аккаунт, авторизуйтесь, чтобы опубликовать от имени своего аккаунта.
Примечание: Ваш пост будет проверен модератором, прежде чем станет видимым.