


Goodefine
-
Постов
1 567 -
Зарегистрирован
-
Посещение
Тип контента
Профили
Форумы
Блоги
Сообщения, опубликованные Goodefine
-
-
Управлять им достаточно просто - Вам же не нужен полноценный генератор, достаточно простого электромагнитного тормоза. Надо сделать регулируемый источник тока, затем экспериментально снять зависимости (семейство кривых) тормозного момента на валу (есть прибор на стенде), от тока возбуждения и оборотов. Будет просто табличка. Если понадобится делать в дальнейшем умное управление (МК, ПК и т.д.) - будет от чего оттолкнуться. А на первых порах и амперметра хватит
0 -
Интересная статья, и список литературы к ней тоже (первая ссылка) )))...
0 -
ЗЫ. Кстати в приводной литературе освещен вопрос типа "Двигатель с фазным ротором в режиме синхронного генератора." И если мне не изменяет память там подмагничивается именно ротор. Умозрительно, при этом внутри двигателя формируется магнитное поле с двумя ярко-выраженными разноименными полюсами, которое будет эффективно пересекать обмотки статора при вращении. Если подмагничивать последовательно обмотки статора, то один полюс вообще окажется снаружи. Поэтому их надо соединять, чтобы в одной половине статора они были последовательны, но половинки соединялись друг с другом встречно (в индуктивном смысле). Для этого придется разобрать двигатель и расшить статорные обмотки - он состоят из отдельных катушек (их число зависит от количества полюсов и определяет синхронную скорость вращения). Тогда по идее, в пространстве внутри статора силовые линии поля будут направлены от одной половины к другой (классическое МП из учебников, но, разумеется, не совсем равномерное), которые и будут пересекать обмотки ротора. Если применить не расшитые обмотки, то их придется задействовать тоже две - встречно включенные. В этом случае МП будет далеко неравномерное. А выбор ротора для подмагничивания в литературе скорее всего обусловлен тем, что обычно требуется получить напряжение на выходе генератора равное номинальному напряжению статорной обмотки. Разумеется, использовать для этой цели ротор не представляется возможным (класс изоляции - рассчитана на меньшее напряжение, а обмотка на больший ток, в статоре наоборот). В Вашем случае, когда не нужно генерировать номинальное напряжение, а только сделать электромагнитный тормоз, наверное можно обойтись и статором. Более того применить режим КЗ (как с трансформатором, есть такой режим измерения его параметров) - закоротить обмотки. Но ток возбуждения придется выбирать такой, при котором токи статора и ротора не превысят допустимых для них. Тормозная мощность на валу, не должна быть меньше 2/3 от штатной (одну обмотку ротора все таки не используем), при питании ротора и не расшитом статоре, и может поболее при питании статора с измененной схемой включения полюсных обмоток. В общем, надо читать литературу и смотреть..
ЗЫ.ЗЫ. 5. Чернопятов Н.Н., Петров Г.А., Емец В.Ф., Частовский А.В.Использование асинхронных двигателей в качестве синхронных генераторов /Изв.вузов,серия: Энергетика,1983,№9/.
0 -
Но очень желательно плавное регулирование,
Выходом может стать частотный привод с возможностью рекуперации. Только дорогие они на такую мощность. Очень...
Я думал, что роль обмотки статора в генераторном режиме электромашины ограничится только возбуждениемЧерез эту обмотку в генераторном режиме будет прокачиваться активная мощность в сеть, величина которой может быть значительно больше мощности ЛАТРа.
Я полагал приблизить принцип работы этой элетромашины к автомобильному генератору переменного тока (это ведь синхронный генератор? - частота тока обмоток статора равна частоте вращения ротора)Значит я неправильно понял (считал что Вы хотите статор подключить к обычной сети. Если на же нагрузку (резисторы) то работать будет. Два минуса только - сложный источник подмагничивания и отсутствие рекуперации (так хоть польза от дополнительной энергии в сеть)
Т.е. если организовывать работу по принципу синхронного генератора, то лучше всего возбуждение постоянным током подавать на ротор либо на статор?Поскольку резисторы и так подключены к ротору (хотя они могут и не потребоваться), есть возможность коммутации обмоток, да и сопротивление выше а ток потребуется меньше, я бы сказал что статор выигрывает. Хотя тут надо смотреть, как сформирутся магнитное поле в итоге. Вполне возможно что есть нюансы, по которым ротор окажется предпочтительнее. Надо читать литературу.
Для решения поставленной задачи вариант с синхронным генератором очень удачный, т.к. возможно будет отойти от частоты синхронизма и тем самым расширить рабочий диапазон скоростей вращения вала тормоза. Можно будет прямой передачей соединить генератор с коленчатым валом ДВС (УМЗ-4216 - номинал 4000 мин-1).Он неудачен только по энергетическим потерям от недополученной рекуперативной энергии. По частоте вращения - ТТХ еще учитывают наверняка и балансировку машины. Как бы в разнос не пошла.
Может применить сварочный трансформатор (с реостатом) + выпрямитель?У сварочника ПВ включения может не хватить на время испытания. Но как вариант. Лучше реостата - индуктивный регулятор.
0 -
Необходимо заменить жидкостный реостат на имеющуюся батарею резисторов схожего номинала и при этом управлять нагрузкой.
Так замените. Коммутацию (выбор величины сопротивления) придется осуществлять контакторами. Не знаю какой шаг нужен для работы стенда, но контакторов может потребоваться много (по одному на ступень регулирования). Так обычно и делаю при задании пусковых характеристик.
1. Оставить асинхронный принцип работы и подключить питающую сеть через автотрансформатор:Регулировать момент сопротивления конечно можно, зависимость есть (от оборотов и напряжения на обмотках).
Я смогу достать 3-х фазный ЛАТР на 6,3 кВт.Вас не смущает что мощность ЛАТРа почти на порядок меньше номинальной мощности двигателя?
Не сгорит ли он при номинальной тормозной мощности в 70 кВт при 3000 мин-1. Выдержка из паспорта: " В генераторном режиме электромашина начинает работать автоматически, как только её ротору сообщается обкатываемым двигателем частота вращения выше синхронной (свыше 1500 мин-1).Тормозная мощность эта просто механический момент на валу. Генераторный режим возникает когда скорость вращения ротора начинает превышать синхронную - тормозная мощность становится со знаком минус (т.е. становится разгонной). При этом машина продолжает потреблять реактивную мощность, но в сеть отдает активную (рекуперация).
При этом значительная часть механической энергии ДВС преобразуется в электрическую и рекуперируется в питающую сеть" (как это понимать - городская сеть будет получать около 30 кВт?, а остальные 40 рассеиваются в нагрузке ротора?).Примерно так - по конкретным числам надо считать - резисторы в роторе просто будут снижать КПД за счет потерь в них. Если их исключить, КПД генератора (без учета механики) будет практически равен КПД двигателя.
2. Попробовать организовать работу по принципу синхронной машины. Суммарное сопротивление 2-х обмоток (или шин) 3-х фазного ротора (звезда) - 0,05 Ом. Каждая обмотка (из 3-х) статора около 0,15 Ом. Выдержат ли обмотки постоянный ток?Если устроит постоянная частота вращения ротора (определение синхронной машины) то можно попробовать. По току - 200 А обмотки выдержат (паспорт). Скин эффектом пренебрегаем. Но регулируемый источник постоянки на такой ток выйдет не шуточный.
3. Подавать питающую сеть переменного тока не на статор, а на ротор. Что из этого выйдет?Машина с фазным ротором это практически тот же трансформатор со своим коэфф. трансформации, зависящим от пространственного положения ротора (есть регуляторы - с заторможенным ротором - можете применить второй такой движок вместо ЛАТРа, кстати). Что будет если в трансформаторе перепутать первичку со вторичкой? В этом случае будет что то примерно похожее.
0 -
Нужна широкополосная и легко настраиваемая, некритичная к размерам но с приличным усилением? Делайте логопериодическую. Могу даже ссылку на программу для расчета подсказать )))
0 -
Все почему-то стремятся втулить в одну строчку массу символов которую фиг с наскока разберешь...
Вы считаете что это Си виноват?
0 -
Меня тошнит от С из-за его нечитабельности...
Хорошая шутка ...
#define nop asm ("PUSH R0":;asm ("POP R0":Вы можете объяснить что ЭТО, и нафига ЭТО вообще совать в обработчик?..
0 -
Неадекватный ответ.
Под стать вопросу.
Что ж. Барахтайтесь сами.
Барахтаться с чем простите?
А я с Гуглом пообщаюсь. Он гораздо любезнее.
С Гугла надо начинать, и дело не в любезности. Здесь не антенна анонсируется, которой 70 лет в обед, а программа для облегчения расчета. Это если кто не заметил. Вам не нужна - проходите мимо, никто никому ничего не навязывает, зачем рассуждать ни о чем, не владея вопросом.
0 -
...не могу подтвердить однозначно Вашу мысль по поводу "Тем более, что данный тип антенн весьма перспективен сейчас."...
Так не подтверждайте ))) Хотите больше узнать по этому вопросу - Гугл большой. А здесь тема не об этом, с уважением.
0 -
Кто-то просто воспользуется...
Именно поэтому и выложил - когда искал, не нашел то что мне нужно, пришлось писать самому. Не пропадать же труду даром. Тем более, что данный тип антенн весьма перспективен сейчас.
Удачи в дальнейших поисках и решениях!Спасибо ))
0 -
...Теперь народ будет делать антенны по уму, а не абы как.
Если ума нет, то и программа не поможет. Вам она точно ни к чему...
0 -
Главный недостаток таких антенн - отсутствие вообще каких либо ярко выраженных резонансных свойств. Так что от "полячки" вы недалеко ушли.
С помощью логопериодических антенн без особых проблем можно получить в широкой полосе частот усиление, примерно эквивалентное трех-четырех элементному волновому каналу. К слову сказать, тот же волновой канал в домашних условиях с числом элементов более 4-х практически нереально настроить. А сравнить свойства таких антенн можно в той же MMANE. Для относительно низких частот лог-я антенна получается громоздкой, но в настоящее время, когда широко применяются частоты выше 600-700 MHz (Wi-Fi, GSM, CDMA и прочее) для нее находится вполне достойная ниша для применения. То что вы пытаетесь выдать за недостаток - ее главное достоинство. У ЛБВ тоже слабо выраженные резонансные свойства, и что с того? До сих пор заменить нечем. Не путайте резонансные свойства с усилением и направленностью. О логопериодических антеннах есть достаточно публикаций, нет смысла здесь перечислять достоинства и недостатки. Рынок их вполне широк, антенна завоевала себе право на жизнь.
Извините,я не понял, к чему вы это все рассказываете?А вы как думаете?
Я в свое время делал нечто подобное с 1-го по 61-й канал без программ,от балды. В укороченном варианте из журнала радио. Тоже работала.
Из журнала Радио - это не от балды. Если вы забьете в программу условия из того же журнала, получите размеры один в один. А то что антенна не критична к размерам - так это до определенного предела. Вы попробуйте в ммане поменять размеры от балды процентов на 10-20 туда-сюда и посмотрите что будет с усилением, КСВ и прочим по диапазону.
0 -
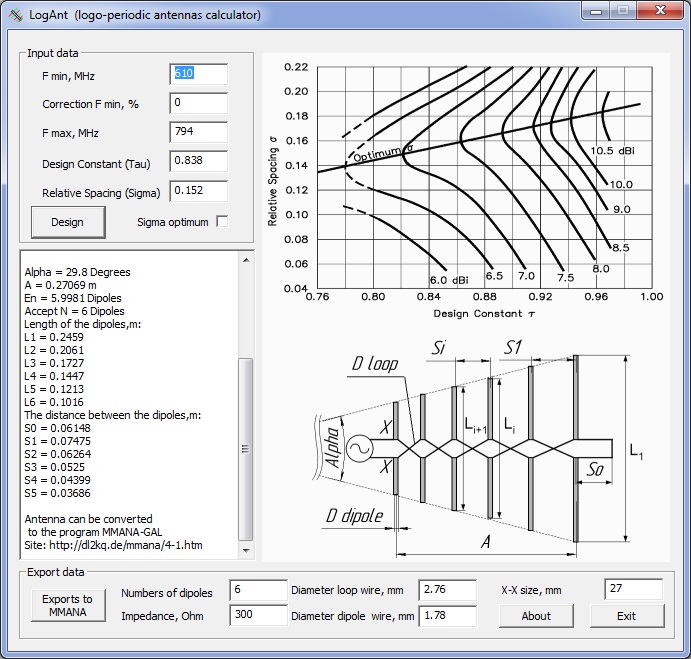
Давеча возникла необходимость в изготовлении ДМВ антенны для приема цифрового телевидения DVB-T/T2. Покупать "полячку" не хотелось по нескольким причинам - посредственные характеристики (плата за широкополосность), излишества в конструкции (МВ часть), особенности материалов (составные части антенны порой отваливаются как листья по осени) плюс электрически разомкнутая система делает уязвимым усилитель. Антенны типа волнового канала тоже не подходят - полоса частот цифрового ТВ в нашей местности 610-794 МГц, что явно много для такого типа. Единственным приемлемым вариантом является логопериодическая антенна, поскольку сохраняет свои характеристики на всей рабочей полосе частот. И вдобавок, такие приятные особенности, как электрически замкнутая система вибраторов, возможность легкого заземления и т.д.
В процессе гугления обнаружилось, что программ для расчета подобных антенн практически нет. Вернее есть, но в excel-е. Размеры то посчитать можно, но на этом вся автоматизация и заканчивается. Было принято решение совместить приятное с полезным и написать простой калькулятор для расчета логопериодических антенн. Методика расчета бралась из первого тома Антенн Ротхаммеля.
Вот что получилось

Поля формы особых пояснений не требуют. Коррекция минимальной частоты фактически приводит к снижению нижней рабочей частоты. Ротхаммель советует 5% для улучшения F/B. Как выбирать коэффициенты написано у того же автора.
Для экспериментальной проверки реализован экспорт в программу MMANA-GAL, поскольку руками строить там логопериодическую антенну - занятие не из приятных. Для этого жмем кнопку Export, предварительно указав число вибраторов (автоматически округляется до большего а не до ближайшего - сделано специально, но можно поставить свое число, округлив в меньшую сторону и посмотреть что из этого выйдет) и остальные параметры. Волновое сопротивление - это сопротивление по отношению к которому будет считаться КСВ. Остальные параметры легко изменить в самой MMANE. После экспорта программа сообщит что файл LogAnt_Export.maa сохранен/перезаписан в папке с программой:
Подсовываем этот файл MMANE и видим свеже-рассчитанную антенну:
Проводить итерации с размерами довольно удобно. В результате была спроектирована антенна, на изготовление которой ушло пару часов времени, 1 метр медного провода диаметром 6 мм2 и 1.5 м провода 2.5 мм2. Волновое сопротивление подгонялось под 300 Ом (как раз под усилитель SWA).
Программа для расчета во вложении.
3 -
Надо не отражатель, а две пассивные направленные антенны на данный диапазон. Одна антенна смотрит на соту, вторая в карьер. Соединить обычным кабелем.
1 -
В Си вообще нельзя располагать что-либо по фиксированному адресу. Язык не позволяет.
Зато линкер позволяет. Возможностей полно, пример для WinAvr:
http://electronix.ru...showtopic=21555
Надо читать документацию на линкер и все получится, если он позволяет конечно. В CVAVR можно в ОЗУ размещать переменные по фиксированным адресам точно, а во флеше х/з. Да и чего в еепром самому не вписывать номер? Там то точно без всякой головной боли адрес известен.
0 -
<p>
Ассемблерное мышление )))А кто мешает сделать...0 -
Шоб был..
1 -
Рассчитать или выбрать? Поскольку изготавливать его вы вряд ли будете, предположу что второе. Но для выбора одного веса мало - нужно знать сопротивление опоры платформы, иными словами, момент сил трения. Его можно принять постоянным. Потом нужно посчитать динамический момент, т.е. момент который потребуется от двигателя при ускорении, в борьбе с инерциальными силами. Моменты зависят от точки приложения силы мотора, наличия редуктора, его КПД и т.д. Считаете момент инерции для платформы и исходя из нужного максимального ускорения вращения платформы (из техзадания) находите макс. динамический момент. Потом складываете его с моментом силы трения и получаете минимальный момент, который двигатель должен развивать. В общем, сопромат в помощь. Выбираете потом ближайший больший максимальный . Затем нужно проверить двигатель по теплу - т.е. посчитать сколько энергии затрачивается на перемещение платформы, учесть КПД системы, ПВ включения и сравнить с номинальной мощностью шаговика. Этого должно быть достаточно.
3 -
А зачем выходы фильтров заводить на простые ноги 2313? Лог. 0 и лог. 1 для оценки выхода фильтра будет слишком грубо. Лучше взять мегу8 и использовать входы АЦП.
0 -
С триггером все в порядке, спасибо что спросили
0 -
По ходу, это сам робот Бобот вопросы задает ))) Искусственный интеллект вещь такая... не изученная...
0 -
А в чем разница между кнопкой и импульсом?
0 -
Да неужели, придумайте причину повесомее - на запрос lm555 триггер на первой же странице нарисована схема
Удачного вам самообразования в гугле. У меня все.
0







Настройка Компартора
в AVR
Опубликовано
А так?