


SabitofF
-
Постов
520 -
Зарегистрирован
-
Посещение
Тип контента
Профили
Форумы
Блоги
Сообщения, опубликованные SabitofF
-
-
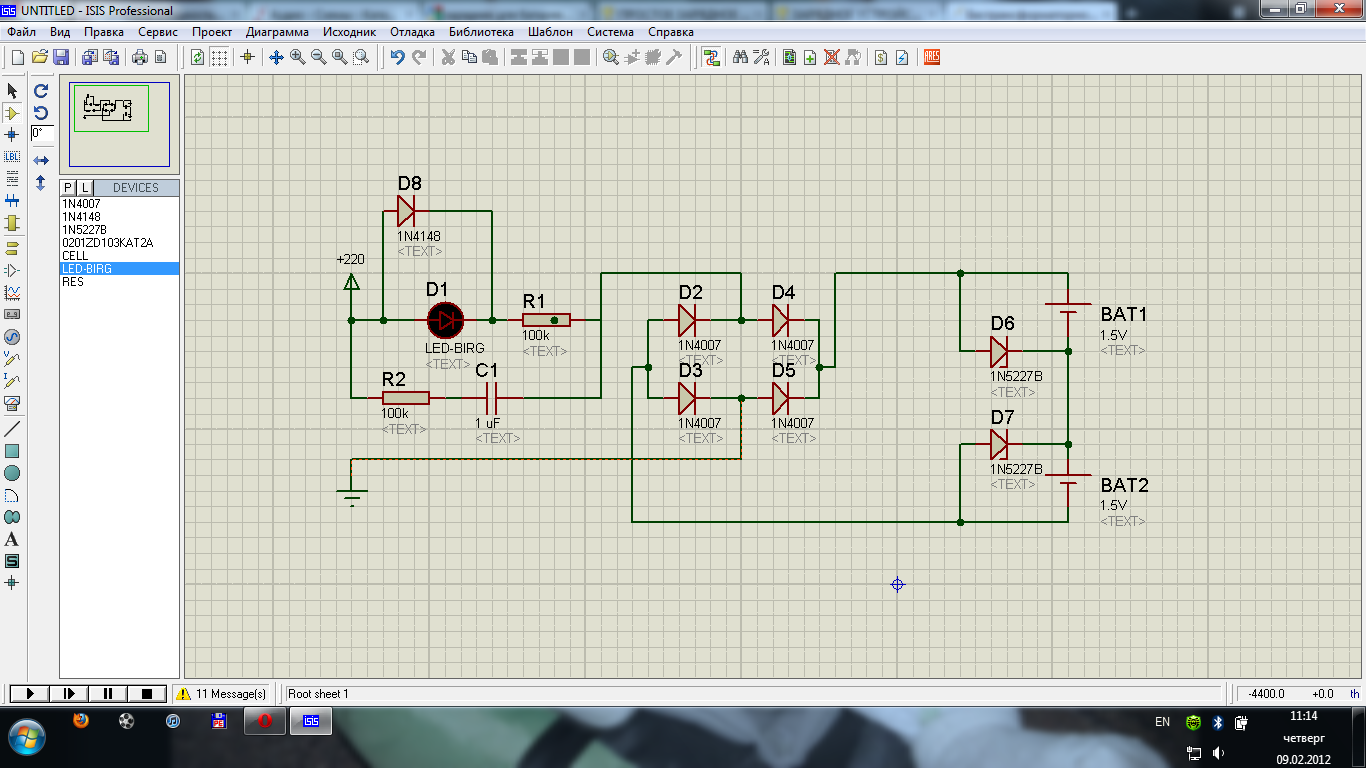
нет мне именно такие батарейки и нужно заряжать на 2700 мА что нужно для того чтобы оно быстрее заряжало?
Качан говорил за Д6, я его и перевернул))
0 -
И можно как-то установить диоды чтобы показывали заряд каждой батарейки, то есть чем больше зарядилать - тускло светит светодиод?
 0
0 -
вот так должно быть?
0 -
нашел схемку простого бестрансформаторного ЗУ для батареек. Хочу сделать его на зарядку двух батареек сразу. Вопрос в следующем: как подключать две батарейки последовательно или параллельно, и нужно ли менять при этом элементную базу?
0 -
зачем обматывают этот резистор, какая его роль?
0 -
а в цифрах можно??)) то есть после намотки сколько у Вас получилось? А то у меня получается 6,4 Ом
0 -
какое должно быть сопротивление R28 уже с намотанной на него проволкой?
0 -
скажите, а усилитель можно запустить от зарядного устройства для автомобильных АКБ там 12Вольт?
0 -
Если не проволки 0.8мм. чтобы обмотать R28...можно его обмотать 0.6мм. если да то сколько витков нужно сделать?
0 -
спасибо, а 2SA1837 и 2SC4793 заменить на вот это можно? И если да, то что на что именно заменять нужно?
0 -
можно ли заменить R28 (3,9 Ом 2Вт) на 3,6 Ом 2Вт??
0 -
да, это ЛУТ. из нашенского есть на рінке почти всё из КТ (сейчас на руках есть КТ817Б/КТ817К), но я не знаю какими можно заменить, и желательно чтобы устанавливать без разворота...
И ещё пару вопросов: 1) у меня был один А1837 и я его уже впаял (выше на фотке видно), можно или в другой впаивать КТ или только по парно?
2) Как правильно сделать L1, и как измерять толщину провода?
0 -
чем можно заменить 2sa1837 и 2sc4793 из нашенского, а то нет на рынке их((
Вот что уже собрал, строго не судите, это первая плата в жизни):
1 -
подскажите, как правильно запиталь его от 220В, и как можно получить 18В для эл.шуруповёрта?
0 -
можно ли сделать зуммер музыкальный, а не просто пищалку?
0 -
Спасибо, посмотрим как оно будет))
0 -
Желательно на ветки
0 -
Я с телефона, здесь нет поиска в этой версии. Так что прошу прощения за это))
0 -
Посоветуйте автомобильный преобразователь для лазарна. На чем лучше его делать? Заранее благодарен.
0 -
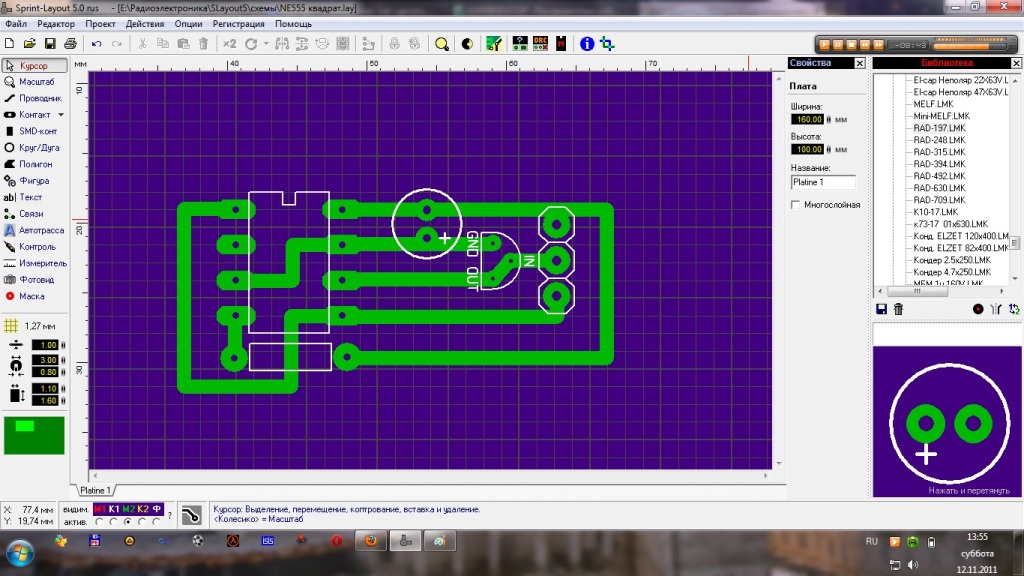
проверьте, пожалуйста, или верно сделал разводку?!
0 -
для этого преобразователя каких размеров должно быть ферритовое кольцо?
0 -
Помогите доработать курсовой. Задание прикрепил. Хочу собрать вот это данное устройство только не знаю как и где в прошивке сделать так чтобы отщет начинался от 100 до 7000 об/минуту-1
Код исходника:
#define TRUE (!FALSE) #define FALSE 0 #define BYTE unsigned char #define WORD unsigned short int #define BOOLEAN char #define TIMER_OVF_ENOUGHT 49 #define NO_PULSES_INTERVAL 200 #define LED_delay 250 #define Light_delay 2500 //#define Anode #define Cathode #define CNT_100_MS 6250 #define byBladeCnt 2 //1- две катушки, 2 - одна катушка, 4 - мотоцикл... #define Prescaler 0x01 //0x00 - для кварца 4MHz, 0x01 - для кварца 8MHz... #define UpCount 4 // +1 = количество пропусков (0,1S) до обновления #include <tiny2313.h> #include <delay.h> BOOLEAN btTimeUpdate; // = 1, когда нужно обновить время на дисплее WORD wTime; // Время, которое показывает секундомер (в десятых секунды) BOOLEAN btTimerOn; // TRUE - таймер запущен, FALSE - остановлен BYTE byTcnt; // счетчик десятых секунд BYTE byDisplayRefreshCnt; // void ShowDisplayData(void); // Вывод экранного буфера void PrepareRpmData(WORD wRpm); BOOLEAN btDisplayUpdate; // = TRUE, если пришло время обновить дисплей BYTE byDisplay[4]; // буфер данных, для вывода на экран WORD wLockedRpm; // Массив знакогенератора BYTE byCharacter[12] = {0xFA, //0 0x82, //1 0xB9, //2 0xAB, //3 0xC3, //4 0x6B, //5 0x7B, //6 0xA2, //7 0xFB, //8 0xEB, //9 0x00, //blank 0x01 //- }; WORD wRpm; // Скорость вращения ротора (об/мин) //BOOLEAN btRpmUpdate; // = 1, когда измеряно новое значение оборотов WORD wTimerOvfCnt; // Счетчик переполнений таймера (нужен для // увеличения разрядности WORD wFlashCnt; // Счетчик срабатываний датчика прохождения допасти BOOLEAN btFirstLowRateFlash; // FALSE - если отсчет периода еще не начался // (датчик ни разу не сработал) /************************************************************************\ Обновление дисплея. Вход: - Выход: - \************************************************************************/ void RefreshDisplay(void) { #asm("cli"); if (btDisplayUpdate) { wLockedRpm = wRpm; btDisplayUpdate = FALSE; } #asm("sei"); PrepareRpmData(wLockedRpm); ShowDisplayData(); } /************************************************************************\ Преобразование скорости мотора и количества лопастей в данные экранного буфера Вход: wRpm - обороты ротора, byBladeCnt - количество лопастей Выход: - \************************************************************************/ void PrepareRpmData(WORD wRpm) { BYTE i; WORD R; R = wRpm; byDisplay[3] = wRpm % 10; wRpm /= 10; if (byDisplay[3] > 4) //округляем { wRpm++; R += 10; } byDisplay[3] = 0; // Первые 4 цифр - обороты двигателя for(i=0; i<3; i++) { byDisplay[2-i] = wRpm % 10; wRpm /= 10; } if (R < 10) { byDisplay[0] = 10; byDisplay[1] = 10; byDisplay[2] = 10; goto exit; } if ((R >= 10) & (R <100)) { byDisplay[0] = 10; byDisplay[1] = 10; goto exit; } if ((R >= 100) & (R <1000)) { byDisplay[0] = 10; goto exit; } exit: } /************************************************************************\ Вывод экранного буфера на дисплей. Вход: - Выход: - \************************************************************************/ void ShowDisplayData(void) { #ifdef Cathode PORTB = byCharacter[byDisplay[0]]; PORTD.5 = 0; delay_us(LED_delay); PORTD.5 = 1; PORTB = byCharacter[byDisplay[1]]; PORTD.1 = 0; delay_us(LED_delay); PORTD.1 = 1; PORTB = byCharacter[byDisplay[2]]; PORTD.0 = 0; delay_us(LED_delay); PORTD.0 = 1; PORTB = byCharacter[byDisplay[3]]; PORTD.4 = 0; delay_us(LED_delay); PORTD.4 = 1; #endif #ifdef Anode PORTB = ~byCharacter[byDisplay[0]]; PORTD.5 = 1; delay_us(LED_delay); PORTD.5 = 0; PORTB = ~byCharacter[byDisplay[1]]; PORTD.1 = 1; delay_us(LED_delay); PORTD.1 = 0; PORTB = ~byCharacter[byDisplay[2]]; PORTD.0 = 1; delay_us(LED_delay); PORTD.0 = 0; PORTB = ~byCharacter[byDisplay[3]]; PORTD.4 = 1; delay_us(LED_delay); PORTD.4 = 0; #endif if (! PIND.6) { delay_us(Light_delay); } } /**************************************************************************\ Обработка прерываний от OC1 (для отсчета импульсов 0.1 сек) Вход: - Выход: - \**************************************************************************/ interrupt [TIM1_COMPA] void SYSTEM_TICK_interrupt(void) { // Вычисляем оммент следующего срабатывания таймера OCR1A += CNT_100_MS; // 3 раза в секунду перерисовываем дисплей, // независимо от обстоятельств. if( ++byDisplayRefreshCnt == UpCount ) { byDisplayRefreshCnt = 0; btDisplayUpdate = TRUE; } // Если секундомер запущен - инкрементируем его показания if( btTimerOn ) { if (++byTcnt == 10) { byTcnt = 0; if( ++wTime == 60000) wTime = 0; } } } /**************************************************************************\ Обработка прерываний от управляющих импульсов Вход: - Выход: - \**************************************************************************/ interrupt [EXT_INT0] void RPM_PULSE_interrupt(void) { long lTmp; GIMSK &= ~0x40; if(btFirstLowRateFlash) { // Первый импульс, сбрасываем счетчик периода и // счетчик импульсов wTimerOvfCnt = 0; wFlashCnt = 0; TCNT0 = 0; TIFR = 0x02; TCCR0B = 0x03; // FCK / 64 ( 62.5 KHz ) TCNT0 = 0; TIMSK |= 0x02; // Разрешаем прерывания от TMR0 btFirstLowRateFlash = FALSE; } else { wFlashCnt++; // Проверяем, не пора ли закончить измерения if( wTimerOvfCnt > TIMER_OVF_ENOUGHT ) { TCCR0B = 0; // Останавливаем TMR0 GIMSK &= 0x40; // Запрещаем прерывания от INT0 TIMSK &= ~0x02; // Запрещаем прерывания от TMR0 if(TIFR & 0x02) wTimerOvfCnt++; // Учитываем возможность переполнения lTmp = (62500L * 60L * (long)wFlashCnt); lTmp /= ((wTimerOvfCnt << 8) + TCNT0); lTmp /= byBladeCnt; wRpm = lTmp; // Перезапускаем измерения btFirstLowRateFlash = TRUE; wTimerOvfCnt = 0; TCNT0 = 0; TCCR0B = 0x03; // FCK / 64 ( 62.5 KHz ) TCNT0 = 0; TIFR = 0x02; TIMSK |= 0x02; // Разрешаем прерывания от TMR0 // GIFR = 0x40; } } EIFR = 0x40; GIMSK |= 0x40; } /**************************************************************************\ Обработка переполнений TMR0 (добавляем к счетчику еще 8 разрядов) Вход: - Выход: - \**************************************************************************/ interrupt [TIM0_OVF] void TIMER0_interrupt(void) { wTimerOvfCnt++; // Если импульсов не было слишком долго, то показываем // 0 оборотов и запускаем измерение заново if( wTimerOvfCnt > NO_PULSES_INTERVAL ) { wRpm = 0; btFirstLowRateFlash = TRUE; wTimerOvfCnt = 0; } } /**************************************************************************\ Головная функция. Инициализация всех модулей. Цикл вызова рабочих подпрограмм. Вход: - Выход: - \**************************************************************************/ void main(void) { // Crystal Oscillator division factor: #pragma optsize- CLKPR=0x80; CLKPR=Prescaler; //0x00 - для кварца 4MHz, 0x01 - для кварца 8MHz... #ifdef _OPTIMIZE_SIZE_ #pragma optsize+ #endif #asm("cli"); MCUCR = 0x00; // Запрещаем SLEEP, режимы прерывания пока не важны. // В принципе, этого можно и не делать. GIMSK = 0x00; // Запрещаем внешние прерывания EIFR = 0xFF; // Очищаем флаги прерываний TIMSK = 0x00; // Запрещаем прерывания от таймеров TIFR = 0xFF; // Очищаем флаги прерываний //Разряд DDRx - определяет направление передачи данных (0 - вход, 1 - выход). //Разряд PORTx - если вывод определен выходом (DDRx = 1), то: // если установлена 1 - то на выводе устанавливается лог. 1 // если установлена 0 - то на выводе устанавливается лог. 0 // если вывод определен входом (DDRx = 0), то PORTx - определяет состояние подтягивающего резистора (при PORTx = 1 резистор подключен) //Разряд PINx - доступен только для чтения и содержит физическое значение вывода порта PORTA=0b00000011; DDRA= 0b00000011; PORTB=0b00000000; DDRB= 0b11111111; #ifdef Cathode PORTD=0b01111111; DDRD= 0b00110011; #endif #ifdef Anode PORTD=0b01001100; DDRD= 0b00110011; #endif // Инициализируем модули //time------------------------------------ btTimerOn = FALSE; wTime = 0; byTcnt = 0; byDisplayRefreshCnt = 0; btTimeUpdate = FALSE; TCNT1 = 0; TCCR1A = 0x00; // Отключаем управление выводом OC1 и PWM TCCR1B = 0x03; // На таймер подается FCK через делитель на 64, // шумодав отключен, никакого сброса нет OCR1A = TCNT1 + CNT_100_MS; TIFR |= 0x40; // Сбрасываем флаг прерываний от Output-Compare TIMSK |= 0x40; // Разрешаем прерывание от Output-Compare //time------------------------------------ //rmp------------------------------------- btFirstLowRateFlash = TRUE; wRpm = 0; // Разрешаем прервание INT1 EIFR = 0x40; GIMSK |= 0x40; MCUCR = 0x02; // Настраиваем INT0 на спад, остальные биты не важны. // Таймер запускаем сразу, чтобы проверять // отсутствие сигнала wTimerOvfCnt = 0; TCNT0 = 0; TCCR0B = 0x03; // FCK / 64 ( 62.5 KHz ) TCNT0 = 0; TIMSK |= 0x02; // Разрешаем прерывания от TMR0 //rmp------------------------------------- #asm("sei"); // StartLowRateRpm(); while(TRUE) { RefreshDisplay(); } }0 -
то есть чтобы нарисовать например символ "Н" нужно сделать следующее:
#include <avr/io.h>
#include <delay.h>
int main(void)
{
while(1)
{
PORTB=0b00010010
PORTD=arr[1]
_delay_ms(500)
PORTB=0b00010010
PORTD=arr[2]
_delay_ms(500)
PORTB=0b00011110
PORTD=arr[3]
_delay_ms(500)
PORTB=0b00010010
PORTD=arr[4]
_delay_ms(500)
PORTB=0b00010010
PORTD=arr[5]
_delay_ms(500)
}
}
0 -
сам принцип я понимаю, только не знаю как правильно записать массив и как его описать
0







Бестрансформаторное Зу
в Зарядные устройства и аккумуляторы
Опубликовано
это С1 будет 1000uF??