


GLULOLOKA1
-
Постов
2 -
Зарегистрирован
-
Посещение
Тип контента
Профили
Форумы
Блоги
Сообщения, опубликованные GLULOLOKA1
-
-
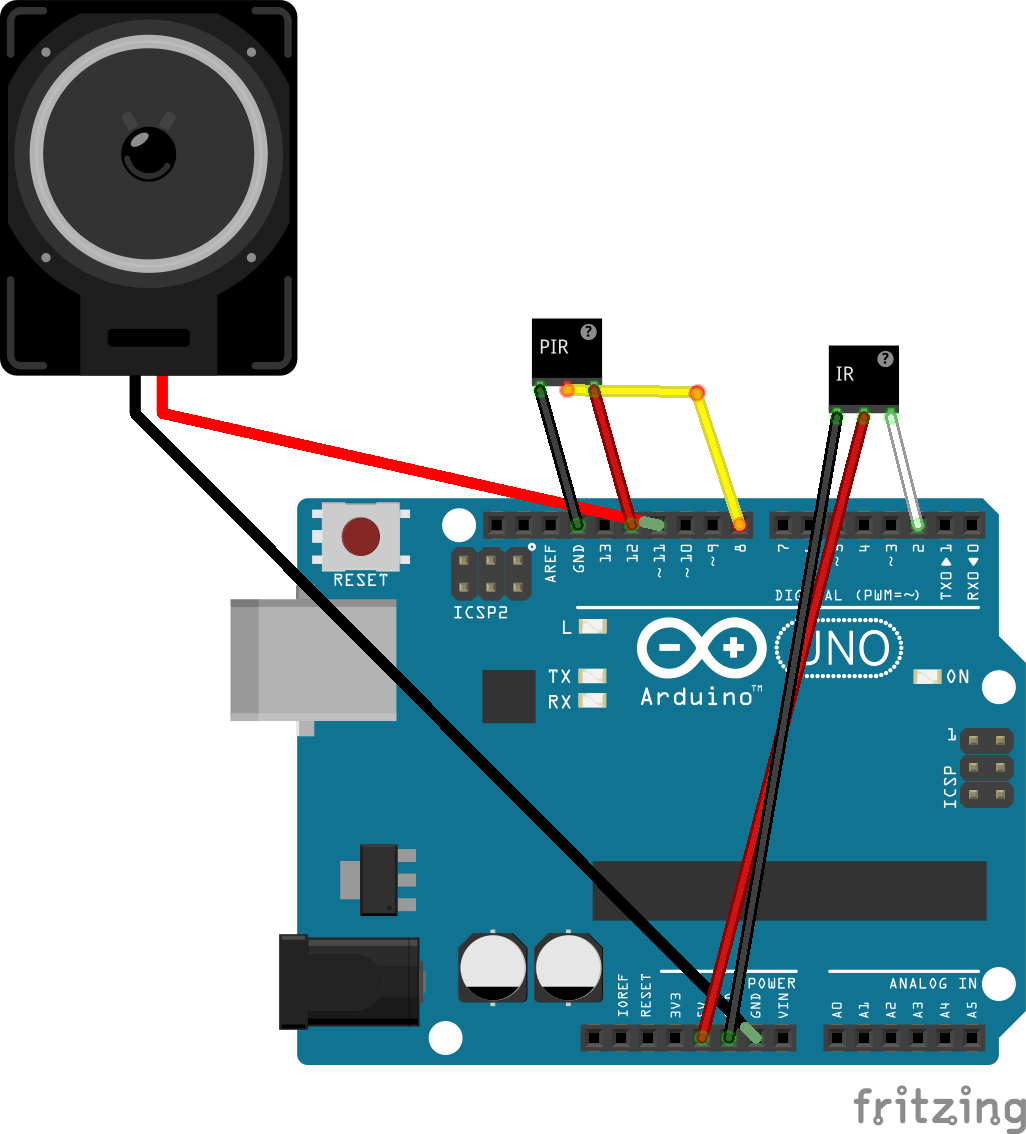
Делаю сигналку на Arduino .
Проблема такая.
Скетч ик управления и скетч PIR Датчика по отдельности работают , а вместе нет.
Хотелось бы узнать как это решить.
Скетч и схема предвидена ниже .
/*
Сигналка
*/
int calibrationTime = 10;
//the time when the sensor outputs a low impulse
long unsigned int lowIn;
//the amount of milliseconds the sensor has to be low
//before we assume all motion has stopped
long unsigned int pause = 5000;
boolean lockLow = true;
boolean takeLowTime;
int pirPin = 8; //вывод подключения PIR сенсора
int Sirena = 13;
int RECV_PIN = 2; //вход ИК приемника
IRrecv irrecv(RECV_PIN);
decode_results results;
int PirPlus = 12;
/////////////////////////////
//SETUP
void setup(){
Serial.begin(9600);
pinMode(pirPin, INPUT);
pinMode(Sirena, OUTPUT);
digitalWrite(pirPin, LOW);
irrecv.enableIRIn(); // включить приемник
pinMode(PirPlus, OUTPUT);
//дадим датчику время на калибровку
Serial.print("calibrating sensor ");
for(int i = 0; i < calibrationTime; i++){
Serial.print(".");
delay(1000);
}
Serial.println(" done");
Serial.println("SENSOR ACTIVE");
delay(50);
}
////////////////////////////
//LOOP
void loop(){
if (irrecv.decode(&results))
{
if (results.value == 0xFF00FF) //код моей кнопки "2FD807F". У Вас он будет дугой
{
digitalWrite(PirPlus, HIGH);
}
if (results.value == 0xFF807F)//код моей кнопки "2FD40BF". У Вас он будет дугой
{
digitalWrite(PirPlus, LOW);
}
irrecv.resume();
}
if(digitalRead(pirPin) == HIGH){
analogWrite(Sirena, 100); //the led visualizes the sensors output pin state
if(lockLow){
//makes sure we wait for a transition to LOW before any further output is made:
lockLow = false;
Serial.println("---");
Serial.print("motion detected at ");
Serial.print(millis()/1000);
Serial.println(" sec");
delay(50);
}
takeLowTime = true;
}
if(digitalRead(pirPin) == LOW){
analogWrite(Sirena, 0); //the led visualizes the sensors output pin state
if(takeLowTime){
lowIn = millis(); //save the time of the transition from high to LOW
takeLowTime = false; //make sure this is only done at the start of a LOW phase
}
//if the sensor is low for more than the given pause,
//we assume that no more motion is going to happen
if(!lockLow && millis() - lowIn > pause){
//makes sure this block of code is only executed again after
//a new motion sequence has been detected
lockLow = true;
Serial.print("motion ended at "); //output
Serial.print((millis() - pause)/1000);
Serial.println(" sec");
delay(50);
}
}
}
 0
0
Проблема В Работе Сигнализации На Arduino
в Охранная сигнализация
Опубликовано
Что-то куда-то все пропали, или спасение утопающих дело рук самих утопающих?