


Anton19
-
Постов
10 -
Зарегистрирован
-
Посещение
Тип контента
Профили
Форумы
Блоги
Сообщения, опубликованные Anton19
-
-
1 минуту назад, Григорий Т. сказал:
@Anton19 где вы увидели цифру 200 кГц?
Вы правы, я ошибся, сейчас исправлю. Подразумевалось 200 герц.
0 -
Добрый день, помогите разобраться чисто в теории как работает эта штука. Я новичек в этой сфере.
У меня есть контроллер stm32 с помощью него я хочу вращать Nema34. Насколько я понимаю stm32 сможет это делать только с помощью драйвера CW8060.
Характеристики устройства на картинке:
ЦитатаCharacteristics:
1.DC power input type:24V~80V
2.Output current:2~6A
3.Mircostepping:1(1.8º),1/2,1/4,1/8,1/16,1/32,1/64,1/128,1/256,1/5,1/10,1/25,1/50,1/125,1/250
4. Protect form : Overheated protect, lock automatic half current ,error connect protect
5. The maximum pulse rate is 200HZ.
6. Dimensions:147mm*97mm*30mm
7. Weight:<500g.
8. Working environment:Temperature-15~40℃ Humidity<90%.
I/O Ports:
1.VCC+:DC power positive pole
Note:Must guard against exceeding 70V, so as not to damage the module
2.GND:DC power cathode
3.A+,A-:Stepping motor one winding
4.B+,B-:Stepping motor other winding
5.CP +,CP -:Stepping pulse input+5V (Rising edge effective ,rising edge duration >10μS)
6.CW +,CW-:Stepping motor direction input, voltage level touched off,high towards, low reverse
7.REST+,REST-: motor free1. Получается что данный драйвер может выдавать шим с частотой 200гц?
2. Если данный драйвер выдает частоту 200 гц, то вывод CP+ тоже воспринимает управляющий импульс с частотой 200 гц?
3. "rising edge duration >10μS" означает что между фронтом и спадом должно быть не меньше 10 микросекунд? Форма сигнала шим должна быть получается исключительно меандр?
4. Верно ли я понимаю что все задача этого драйвера просто "усилить" шим с 3.3 вольт 20 милиампер, до 48 вольт, 6 ампер?
Спасибо.
 0
0 -
Добрый день, подскажите какова частота сигнала на осцилографе 5882 Гц?
0 -
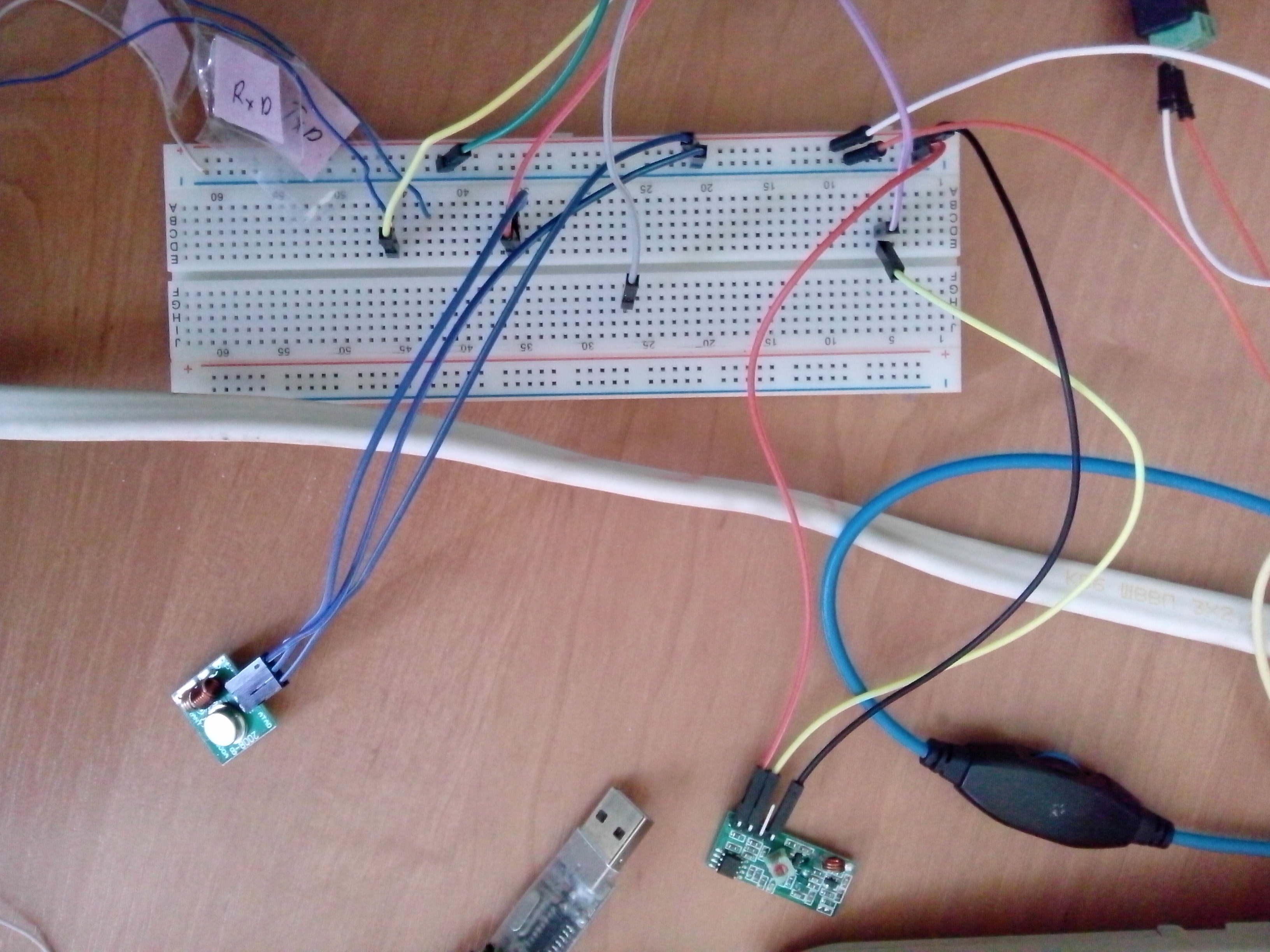
Я отправляю данные через USART2 PA2 (pin2) на передатчик данных, подключил usb-uart к PA2 (pin2) и посмотрел в терминале, что отправляется (AA 44 11 55 AA 44 22 66 AA 44 11 55 AA 44 22 66 ...). Все в порядке, я передаю то, что хочу.
Затем я подключил usb-uart к PA10 (pin10) и посмотрел что приходит через радио приемник, было много данных, но в основном были (AA 44 11 55 AA 44 22 66 AA 44 11 55 AA 44 22 66 ...). Все в порядке, я получаю от приемника, то что нужно.
Затем подключил usb-uart на PA9 (pin9) (uart1 TX) и посмотрели что он передает (AA 22 22 22 22 22 22 22 22 22 22 22 22 22 22 22 22 ...).
Главный вопрос: что я делаю неправильно, почему USART1 TX искажает данные? Как это исправить?#include "stm32f10x.h"
#include "stm32f10x_gpio.h"
#include "stm32f10x_rcc.h"# define SYNC 0XAA
# define RADDR 0x44
# define LEDON 0x11 //switch led on command
# define LEDOFF 0x22 //switch led off commandvoid Delay(void) {
volatile uint32_t i;
for (i = 0; i != 100; i++)
;
}
void send_to_uart1(uint8_t data) {
while (!(USART1 - > SR & USART_SR_TXE)) {}
USART1 - > DR = data;
}void send_to_uart2(uint8_t data) {
while (!(USART2 - > SR & USART_SR_TXE));
USART2 - > DR = data;
}void Send_Packet(uint8_t addr, uint8_t cmd) {
send_to_uart2(SYNC); //send synchro byte
send_to_uart2(addr); //send receiver address
send_to_uart2(cmd); //send increment command
send_to_uart2((addr + cmd)); //send checksum
}uint8_t uart_data;
int main(void) {
GPIO_InitTypeDef PORTA_init_struct;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_USART1, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE);PORTA_init_struct.GPIO_Pin = GPIO_Pin_9;
PORTA_init_struct.GPIO_Speed = GPIO_Speed_2MHz;
PORTA_init_struct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, & PORTA_init_struct);PORTA_init_struct.GPIO_Pin = GPIO_Pin_10;
PORTA_init_struct.GPIO_Speed = GPIO_Speed_50MHz;
PORTA_init_struct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, & PORTA_init_struct);PORTA_init_struct.GPIO_Pin = GPIO_Pin_2;
PORTA_init_struct.GPIO_Speed = GPIO_Speed_50MHz;
PORTA_init_struct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, & PORTA_init_struct);PORTA_init_struct.GPIO_Pin = GPIO_Pin_3;
PORTA_init_struct.GPIO_Speed = GPIO_Speed_50MHz;
PORTA_init_struct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, & PORTA_init_struct);USART_InitTypeDef uart_struct1;
uart_struct1.USART_BaudRate = 600;
uart_struct1.USART_WordLength = USART_WordLength_8b;
uart_struct1.USART_StopBits = USART_StopBits_1;
uart_struct1.USART_Parity = USART_Parity_No;
uart_struct1.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
uart_struct1.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, & uart_struct1);
USART_Cmd(USART1, ENABLE);USART_InitTypeDef uart_struct2;
uart_struct2.USART_BaudRate = 600;
uart_struct2.USART_WordLength = USART_WordLength_8b;
uart_struct2.USART_StopBits = USART_StopBits_1;
uart_struct2.USART_Parity = USART_Parity_No;
uart_struct2.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
uart_struct2.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART2, & uart_struct2);
USART_Cmd(USART2, ENABLE);uint8_t raddress, data, chk;
while (1) {
Send_Packet(RADDR, LEDON);
Delay();
Send_Packet(RADDR, LEDOFF);
Delay();if (USART1 - > SR & USART_SR_RXNE) {
uart_data = USART1 - > DR;
send_to_uart1(uart_data);
}}
}0 -
4 минуты назад, mail_robot сказал:
интересно, а что у вас тогда ловит приемник, если на передатчик нихрена не отправляется?
Ловит какие-то данные из окружающего радио эфира.
0 -
Добрый день, подскажите купил радио Transmitter и Receiver, подключил их через usart к stm32, usart ловит данные из Receiver, но что отрпавлять на Transmitter? Подскажите может ссылку на мануал/пример, ничего не могу найти. Спасибо.
0 -
Добрый день, что будет если соединить STM32F100 например ножки P1-P3 (3.3v) c выводами драйвера CP+,CW+,EN+ которым надо 5 вольт. Насколько я понимаю, просто ничего не будет работать или накроется контроллер. Спасибо.
0 -
4 часа назад, Sergey-Ufa сказал:
В виде отдельной микросхемы такие драйверы вряд ли есть. Существуют законченные драйверы в виде электронного блока. Типа такого
http://www.npoatom.ru/katalog/drivers/g201x/
Это первое, что попалось в поиске.
А может схема законченного драйвера в виде электронного блока где-то есть? Вам не попадалось?
0 -
Подскажите, есть некоторый опыт управления шаговым двигателем с помощью драйвера L293D максимальный ток 1.2 ампера. Теперь хочу управлять более мощным двигателем что-то типа 34HS8801 на 4 ампера. Насколько я понимаю тут уже надо драйвер двигателя собирать самому на или покупать готовый.
1. Не подскажите ли схему на такой драйвер.
Спасибо.0




Помогите! Подскажите! Help!
в Песочница (Q&A)
Опубликовано
Добрый день, являюсь абсолютным новичком в теме радиоелектроники. Собираюсь собрать счетчик гейгера, на основе перобразователя напряжения, stm32 и сбм-20. Решил начать с преобразователя. Немогу только понять где купить трансформатор T1, не хочу очень долго возится с его намоткой. Можете подсказать какой трансформатор необходимо купить или где такой продается. Буду благодарен за ссылку или советы. Спасибо.