

Индикатор здоровья. /Health status/

Запись опубликовал parovoZZ ·
1 217 просмотров
Многие видели промышленные изделия, на платах которых присутствует индикатор "здоровья". Т.е такой индикатор, который моргает и частота моргания напрямую зависит от состояния устройства - часто моргает или редко - заболел совсем или частично, не моргает - что-то сыграло в ящик. Ну или забыли в сеть включить).
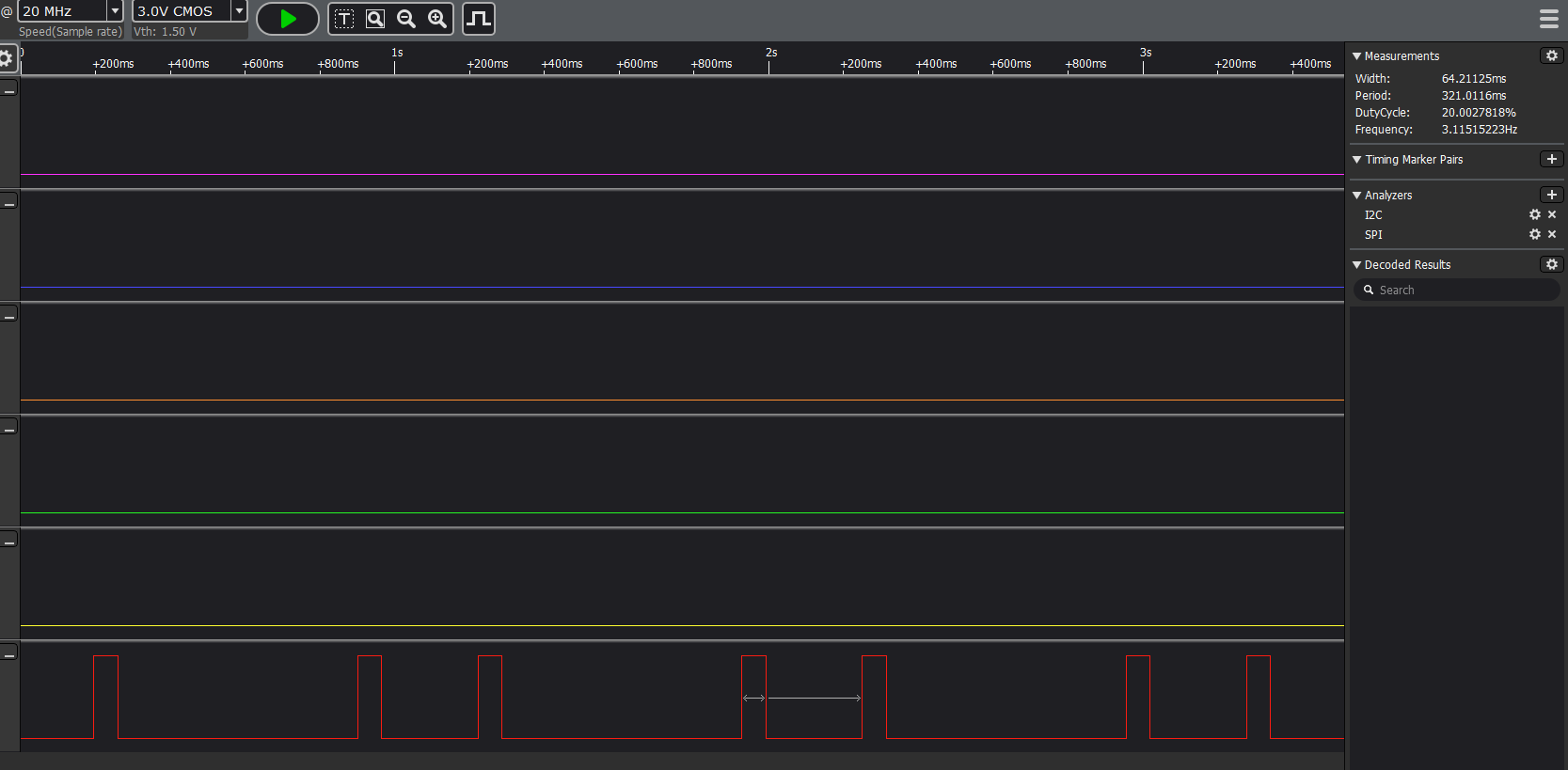
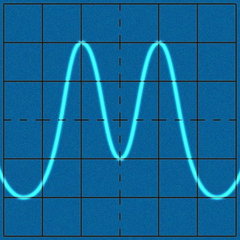
Давайте тоже создадим такой индикатор. Но пойдём ещё дальше - моргать наш индикатор будет не однократными, а двухкратными вспышками. На диаграмме логического анализатора это будет выглядеть примерно так:
Для измерения периодов будет использовать таймер типа TCA. TCA - это тип таймера, а не собственно сам таймер, поэтому запись
TCA.xxx.yy
будет ошибочна. Порядковый номер таймера обозначается цифрой. В нашем случае это таймер TCA0. TCA таймер - это до боли знакомый по atmega таймер - 16 битный счетчик, 3 компаратора, логика счета вверх и вниз. Но есть и новшества - буферные регистры для компараторов и регистра периода.
Режимов работы у таймера несколько - нормальный режим, режим односкатный ШИМ (счетчик считает вверх до максимума и обнуляется), двускатный ШИМ (счетчик досчитав до максимума начинает отсчет вниз). Для реализации нашей задумки мы как раз-таки и будем использовать последний режим. В этом режиме компараторы работают так, как показано на следующем графике:
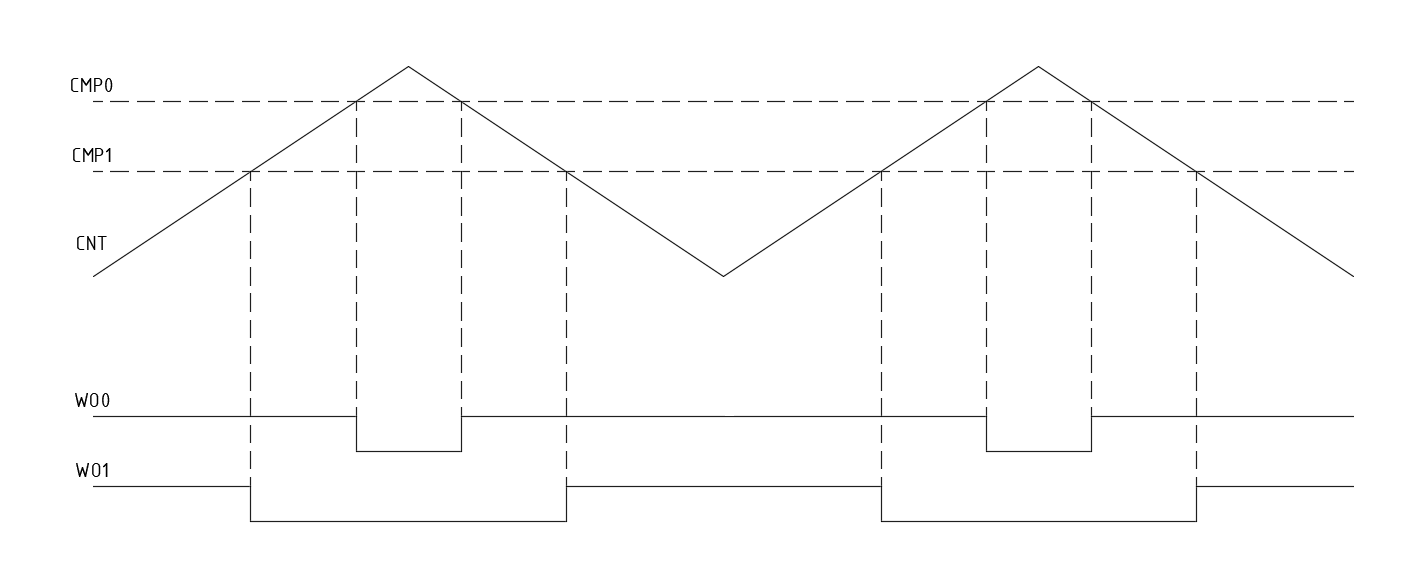
Идея понятна из графика - при счете вверх и совпадении значений регистров CNT и CMPx выход компаратора очищается, при счете вниз - устанавливается. Мы видим, что если выходы компараторов сложить логически по XOR, то на выходе мы получим именно то, что нужно. Складывать (ксорить) мы будем в блоке CCL - Custom Control Logic/
Давайте настраивать наш таймер. Но для начала необходимо настроить главный делитель частоты. С помощью фьюза я выставил привычную для меня частоту в 16 МГц.
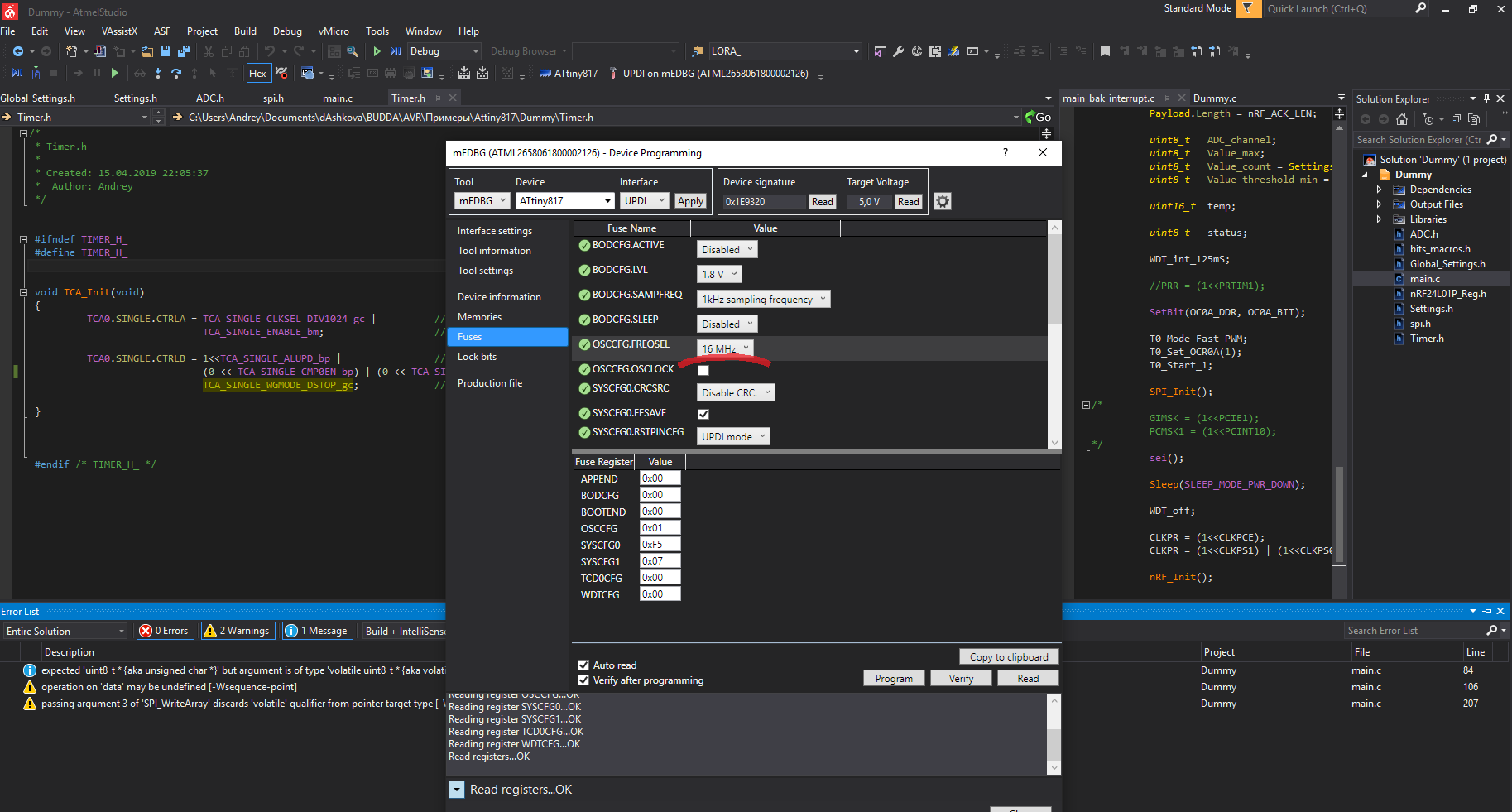
Сразу после ресета, по умолчанию, делитель настраивается на коэффициент 6. Мы это исправим и выставим коэффициент деления 2 не забывая про регистр защиты CCP:
CCP = CCP_IOREG_gc; CLKCTRL.MCLKCTRLB = CLKCTRL_PDIV_2X_gc | CLKCTRL_PEN_bm; // Прескалер главной тактовой частоты
первый бит - это разрешение работы делителя. Если он равен нулю, то деление частоты не производится и равно 1.
Переходим к настройке таймера TCA0. У таймера есть два фундаментальных режима работы - нормальный (single) и сдвоенный (split). В сдвоенном режиме 16-ти битный счетчик распадается на два 8-ми битных и каждый тикает независимо. также в этом режиме количество компараторов умножается на два. Но этот режим я сейчас разбирать не буду. Остановимся на нормальном режиме.
Нормальный режим работы указывается определением SINGLE, как показано ниже. Теперь зададим делитель = 1024 и дадим команду на работу таймера:
TCA0.SINGLE.CTRLA = TCA_SINGLE_CLKSEL_DIV1024_gc | // Определяем значение прескалера TCA_SINGLE_ENABLE_bm; // и включаем таймер
Далее необходимо задать режим работы таймера:
TCA0.SINGLE.CTRLB = 1<<TCA_SINGLE_ALUPD_bp | // Установим бит автоматической блокировки обнолвения регистров компаратора (0 << TCA_SINGLE_CMP0EN_bp) | (0 << TCA_SINGLE_CMP1EN_bp) | (0 << TCA_SINGLE_CMP2EN_bp) | // пины выводов компараторов не включаем TCA_SINGLE_WGMODE_DSTOP_gc; // Режим работы таймера - двухскатный ШИМ с прерыванием OVF в вершине счета
В нашем случае это двухскатный ШИМ с переполнением в максимуме. Бит ALUPD блокирует обновление регистров периода и компараторов тогда, когда это может вызвать уход таймера из под контроля. Т.е. если значение в регистре-буфере периода меньше, чем текущее значение таймера, то регистр периода обновится только тогда, когда значение счетчика станет меньше значения регистра-буфера периода. Также и с регистрами компаратора. Биты CMPхEN разрешают сопоставить свои выходы с физическими выходами МК. Но для физического появления сигнала на выводах, эти выводы необходимо определить на выход. Сопоставление выходов компараторов с физическими ногами задано жестко, но у МК многоножек (таких, как Attiny817) есть также и альтернативные ноги. У attinyxx14 таких альтернативных ног нет. Но свободное назначение не предусмотрено. Мы же записываем в эти биты нули, ибо выходы компараторов у нас будут соединены с модулем CCL внутри МК.
Всё. Таймер у нас настроен и уже тикает. Осталось только наполнить регистры значениями, чтобы тикалось так, как нам хочется. Как обычно, чтобы не искать в коде значения констант, я их выношу в самый вверх в виде определений:
#define TCA_period 4000 #define TCA_cmp0 3000 #define TCA_cmp1 2500
И где-то в коде заполняем регистры:
TCA_Init(); TCA0.SINGLE.PER = TCA_period; TCA0.SINGLE.CMP0 = TCA_cmp0; TCA0.SINGLE.CMP1 = TCA_cmp1;
С таймером на этом всё. Переходим к CCL/
CCL. Configurable Custom Logic. Чтобы понять суть этого блока, давайте посмотрим на его блок схему.

CCL состояит из двух таблиц истинности (LUT), далле фильтр/синхронизатор, детектор фронта и обе таблицы совими выходами могут быть подключены к Sequental Logic (не знаю, как правильно перевести. Дословно - последовательная логика. Почему? Либо они курят чего, либо я не вытягиваю предмет). Для чего фильтр? Тот, кто работал с логическими схемами в железе (155 серия, ага)), знает, что сигнал от входа к выходу в реальном железе распространяется не мгновенно, а с конечной скоростью. Так вот если даже на входе сигнал изменится одновременно, то внутренняя схема переключается с задержкой и из-за этого возникают иголки на выходе. Иголки по длительности совсем короткие, но весьма способны повлиять на работу дальнейшей схемы. Особенно этому подвержены дешифраторы, сложные логические схемы (про абсолютную помехуНЕустойчивость наших КМОП серий знают, наверное, все). В виду того, что LUT может быть подключен к внешним выводам МК как входами (через систему асинхронных событий), так и выходами, то для исключения таких вот иголок и введен фильтр. Работает просто - изменения сигнала привязываются к тактирующему сигналу. Детектор фронта, как утверждает даташит, детектирует только передний фронт. Если нужна реакция по заднему фронту - переверните логику работы LUT. В даташите так вот и написано. Sequental Logic может быть одним из триггеров: RS, D, и JK. D триггер представлен в двух вариациях - классический с входами Data и Clock и с защелкой (Gate). Если на входе защелки установлен "0", то триггер не при каких обстоятельствах не меняет своего состояния. Но всю эту кухню мы сегодня готовить не будем, а разберем LUT.
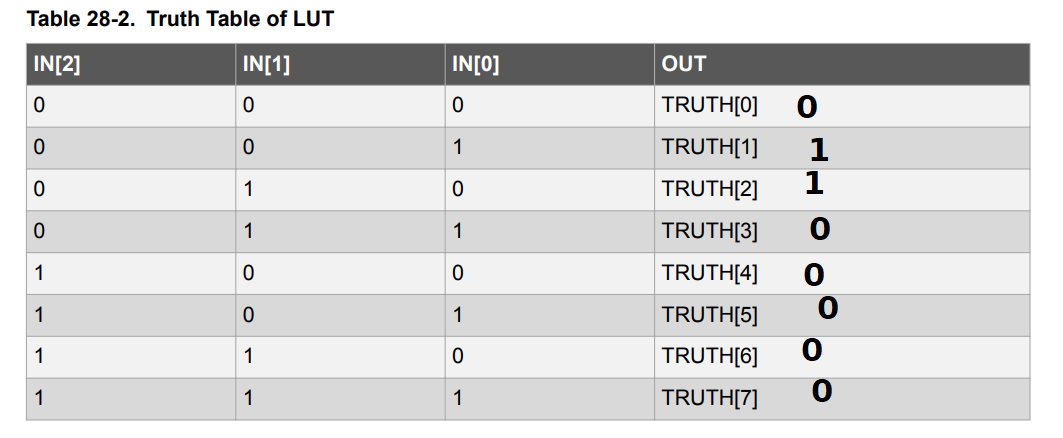
LUT представляет из себя конфигурируемую логику с тремя входами и одним выходом. Реакция выхода на входное воздействие полностью программируется. В нашем случае мы используем всего два входа. Логика работы такая - если на этих двух входах разные состояния, то на выходе "1". В остальных случаях "0". XOR, одним словом.
Реакцию выхода на входное воздействие написали, теперь подключим это входное воздействие. Подключаться будем к выходам компараторов таймера TCA0:
CCL.LUT0CTRLB = CCL_INSEL0_TCA0_gc // W0 | CCL_INSEL1_TCA0_gc // WO1;
Теперь остальные настройки - разрешим работу LUT и разрешим его выход подключить на физическую ножку:
CCL.LUT0CTRLA = 0 << CCL_CLKSRC_bp | 1 << CCL_ENABLE_bp | 1 << CCL_OUTEN_bp;
Бит CLKSRC определяет из какого источника будут тактироваться фильтр и детектор фронта. Здесь мы их не используем, поэтому смело ставим в ноль.
Ножку выхода LUT также надо настроить на выход, иначе ничего вообще работать не будет (в буквальном смысле):
PORTC.DIR |= PIN0_bm;
Работу LUT разрешили, теперь надо разрешить работу самого блока CCL:
CCL.CTRLA = 1 << CCL_ENABLE_bp | 0 << CCL_RUNSTDBY_bp;
Последний бит определяет - будет ли блок работать в режиме StandBy или нет. Это напрямую влияет на энергопотребление, поэтому изначально все модули выключены (в серии atmega наоборот ((____ ).
Ну вот и всё. Осталось написать самый главный код в самом главном цикле и запустить программу в свободное выполнение:
while (1)
{
}
Прошиваем МК и смотрим на подключенный к выводу PC0 светодиод. Т.к. его вы не видите, то специально для вас я подключил ЛА и выложил картинку в первом сообщении.
ENJOY!







1 Комментарий
Рекомендуемые комментарии
Присоединяйтесь к обсуждению
Вы публикуете как гость. Если у вас есть аккаунт, авторизуйтесь, чтобы опубликовать от имени своего аккаунта.
Примечание: Ваш пост будет проверен модератором, прежде чем станет видимым.